











Les robots « voient » les objets transparents
L’Institut Fraunhofer IOF a réussi à associer son capteur 3D MWIR Glass360Dgree à un robot, rendant ainsi, pour la première fois, les objets transparents visibles à ce dernier.
Capturer des objets transparents en trois dimensions est un défi majeur. Tout comme les oiseaux ont des difficultés à reconnaître les grandes baies vitrées, les robots sont, eux aussi, limités dans leurs capacités : ils ne peuvent pas « voir » le verre ou d’autres « surfaces non coopératives » telles que des surfaces en métal brillant, extrêmement réfléchissantes ou noir de jais.
Cela a empêché l’utilisation de robots dans un environnement industriel par le passé, et fortement limité de nombreux projets d’automatisation en raison de la détection trop lente ou d’une manière trop imprécise en 3D de ces surfaces non coopératives.
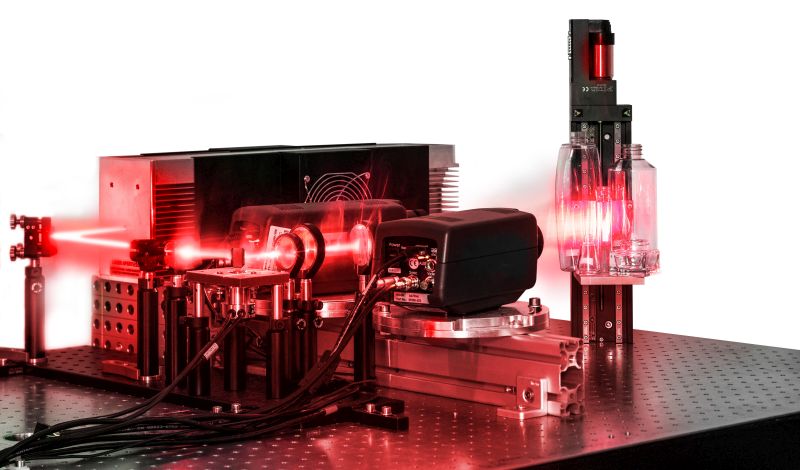
Configuration démontrant le principe de mesure 3D MWIR. [Crédit : Fraunhofer IOF]
Pour cela, le système combine projection laser infrarouge et thermographie : après avoir chauffé localement l’objet à mesurer via un laser CO2-la différence de température entre les surfaces chauffées et non chauffées est généralement inférieure à 3 °C-, deux caméras thermiques déterminent la distribution de température résultante à la surface dudit objet.
Contrairement aux capteurs conventionnellement utilisés, le système développé par l’Institut Fraunhofer IOF ne nécessite ni mesures supplémentaires ni marquages spéciaux appliqués temporairement, par exemple sous la forme de peinture (en aérosol).
Un logiciel développé au sein de l’institut analyse les images de la signature thermique laissées par la ligne infrarouge étroite sur l’objet pendant une courte période. Il utilise les deux angles de vue différents et la déformation résultante dans le motif de frange pour reconstruire les coordonnées spatiales, et il fusionne ensuite les données dans les dimensions exactes de l’objet mesuré.
Ces derniers mois, les chercheurs ont réussi à augmenter la vitesse de mesure et à optimiser les paramètres du champ de mesure, et ils ont également étudié diverses options pour la configuration optique du Glass360Dgree, afin d’adapter le champ de mesure à la tâche à accomplir et à l’espace disponible dans une usine de fabrication.
Le système fonctionne avec le rayonnement thermique pour détecter en 3D les objets transparents. [Crédit : Fraunhofer IOF]
« Notre groupe de recherche coopère depuis des années avec des entreprises issues d’un large éventail de domaines de production, parmi lesquels on trouve des entreprises de la fabrication de semi-conducteurs, de l’industrie automobile et de l’aviation. Nous avons pu identifier trois points clés pour une utilisation potentielle dans une usine de fabrication à grande échelle », explique Stefan Heist.
Au-delà des semi-conducteurs ou de l’automobile, le capteur 3D développé par l’Institut Franhofer IOF et qui sera présenté lors du salon Control, du 3 au 6 mai 2022, et de la Foire de Hanovre, du 30 mai au 2 juin 2022, ouvre de nouvelles possibilités dans l’automatisation des procédés industriels et la conception de produits, de par sa grande flexibilité et sa polyvalence unique.







