L’écholocalisation à ultrasons au service de la sécurité des robots

Toposens a lancé sur le marché le premier système d’évitement de collision 3D commercial, basé sur son capteur d’écholocalisation à ultrasons 3D Echo One, pour les robots mobiles.
Avec l’essor des AMR (Autonomous Mobile Robots), des chariots élévateurs automatisés et autres AGV (Automatic Guided Vehicles), la sécurité des personnes et des machines reste au premier plan des fabricants et industriels. L’évitement des collisions 3D est une nécessité, car les capteurs optiques tels que les Lidar ont des capacités de perception limitées, en particulier dans des environnements difficiles.
Après plus de sept ans de recherche & développement – « en amont de la production, nous avons codéveloppé et testé l’Echo One dans des projets pilotes et des configurations réelles avec des entreprises depuis près de deux ans », précise Tobias Bahnemann, cofondateur et CEO de Toposens – , la jeune pousse munichoise vient d’annoncer le lancement sur le marché de son premier système d’évitement de collision 3D commercial pour les robots mobiles.
 Le nouveau système est constitué d’un capteur d’écholocalisation à ultrasons 3D Echo One et d’une unité de traitement. Basé sur le principe de l’écholocation, comme celui des chauves-souris, le capteur compense les inconvénients des modèles optiques grâce à une triangulation basée sur le son, associée à un logiciel de filtrage du bruit.
Le nouveau système est constitué d’un capteur d’écholocalisation à ultrasons 3D Echo One et d’une unité de traitement. Basé sur le principe de l’écholocation, comme celui des chauves-souris, le capteur compense les inconvénients des modèles optiques grâce à une triangulation basée sur le son, associée à un logiciel de filtrage du bruit.
Le capteur fournit, sous la forme d’un nuage de points 3D, les données – les réflexions d’écho perçues par trois microphones – en temps réel pour chaque obstacle détecté dans les zones d’avertissement et d’arrêt entièrement réglables. Les deux zones peuvent d’ailleurs être configurées pour suivre dynamiquement un robot mobile prenant un virage à gauche ou à droite, et s’adapter à sa vitesse.
« Être capable de détecter plusieurs obstacles difficiles à identifier d’une manière fiable et en temps réel, quelles que soient les conditions environnementales, nous permet de fournir une sécurité robotique de niveau supérieur à nos clients », insiste Tobias Bahnemann.
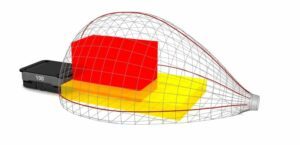
Solution d’évitement des collisions 3D de Toposens, avec un champ de vision 3D comprenant une zone d’avertissement (jaune) et une zone d’arrêt (rouge).
A partir du nuage de points 3D, l’unité de traitement, qui est dotée d’un logiciel (des filtres) d’évitement de collision 3D facile à configurer, envoie soit une commande « Ralentir », soit une commande « Arrêter » au robot mobile, en fonction des violations de zone 3D détectées. Si aucune violation n’est détectée, le robot continue d’avancer.
« Notre solution permet aux robots mobiles de “voir” leur environnement et, donc, de pallier les limites d’évitement des collisions 3D des solutions existantes, le revers économique des marchandises endommagées ou même les arrêts de production coûteux en raison d’obstacles non détectés, ainsi que d’améliorer le ROI des robots mobiles », affirme Tobias Bahnemann.